全國服務咨詢熱線:
13675884706
13675884706

產品分類
Product Category詳細介紹
| 品牌 | 其他品牌 | 應用領域 | 電子 |
|---|
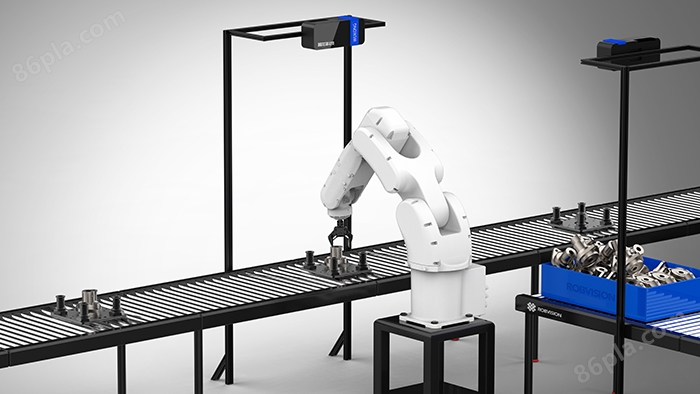
機器人3D視覺引導解決方案專業針對散亂無序堆放的工件設計,可協助機器人實現3D智能抓取。通過對工件3D數據掃描以實現三維準確定位,引導機械手準確抓取定位工件,實現了工業機器人自動化生產線的柔性工裝。
當前,機器人3D視覺在自動化焊接、自動化切割、自動化裝配、自動化抓取、自動化碼垛等應用較多,一般要求圖像處理能識別物體的位姿或者物體邊緣的3D坐標。因此,對于3D圖像處理技術要解決的問題有2個,物體識別和邊緣輪廓提取。可采用以下方式來解決此問題。
機器人3D視覺引導解決方案結構光原理的3D相機由相機和投影儀組成。投影儀投射出一系列條紋光,條紋光按照編碼進行變換,相機拍攝到條紋后,終解算出物體的3D信息。為了消除盲區,結構光原理的3D相機一般會采用2只相機和1個投影儀的方式搭建。
可以完成以下任務:
多品種工件的機器人3D定位抓取上料
料框堆疊物體3D識別定位
復雜多面工件的柔性化3D定位抓取
大型物體3D定位抓取
工件的無序來料3D定位
多工序間機器人協作3D定位抓取
輸送帶上物體的快速3D定位抓取
噴涂機器人來料3D識別定位
大型設備的機器人裝配3D定位
機器人3D視覺引導解決方案技術參數:
| WuKong-0230B | WuKong-0230C | WuKong-0300B |
描述 | 為零件分揀設計,適用于各種金屬、黑色零件。 | RGBD同時成像,大視野,適用于快遞、零食、藥品等商品分揀 | 可精確掃描,適用于掃描電子PCB板等小物體。 |
像素 | 2.3M | 2.3M | 3M |
視野(mm)★ | 375*235~2000*1250 | 375*235~2000*1250 | 389*243*80 |
掃描時間(s)★ | 快0.2 | ||
工作距離(s)★ | 0.45~2.4 | 0.45~2.4 | 0.7 |
Z軸精度★ | 0.4mm@1m | 0.6mm@1m | 0.1mm@0.7m |
數據接口 | RJ45以太網(Gige) | ||
供電 | DC12V 6A | ||
體積 | - | - | -
|
產品咨詢
電話
微信掃一掃

 當前位置:
當前位置:
